
Artykuł jest częścią Przewodnika przemysłowego – cyklu poświęconego rozwiązaniom stosowanym w przedsiębiorstwach produkcyjnych. Pierwszy odcinek serii był poświęcony cobotom.
Wózki samojezdne AGV (ang. automated guided vehicles), czyli transportowe roboty mobilne, które dzięki systemom nawigacji nie potrzebują stałej obsługi operatorów, po raz pierwszy pojawiły się w latach 50. ubiegłego wieku. Pomysłodawca urządzeń, Arthur Mac Barrett, określał je pojazdami bez kierowcy. W 1953 roku Barrett zmodyfikował ciągnik holowniczy używany w magazynie sklepu spożywczego, żeby podążał za sygnałem wysyłanym przez przewód umieszczony w suficie. Później wynalazca wytwarzał podobne pojazdy pod marką „Guide-O-Matic”, a przewody zaczęto instalować w podłodze. W przedsiębiorstwie Barrett Electronics z siedzibą w Northbrook w stanie Illinois powstały również urządzenia Radox, o czym wspomina Kenneth Ruehrdanz z firmy Dematic, który po studiach zaczął pracę w firmie innowatora:
– Barrett był pionierem sterowanych radiowo suwnic i pojazdów przemysłowych o nazwie Radox. Dzięki nim osoby odpowiedzialne za skompletowanie zamówień i umieszczające skrzynki na paletach mogły automatyczne pokierować wózkiem paletowym lub pojazdem holowniczym ciągnącym przyczepy do następnego miejsca odbioru – tłumaczy Ruehrdanz.

Początki AGV w Europie
Jak pisze Günter Ullrich w publikacji pt. „Automated Guided Vehicle Systems”, początki samojezdnych maszyn w Europie przypadły na rok 1956, kiedy angielska firma EMI (jedna z największych wytwórni płytowych) opracowała pojazd poruszający się wzdłuż kolorowej taśmy naklejonej na podłodze i rozpoznawanej dzięki czujnikowi optycznemu. Z kolei niemieckie przedsiębiorstwa – Jungheinrich w Hamburgu i Wagner w Reutlingen – prace nad samojezdnymi maszynami zaczęły w latach 60. Firmy najpierw zautomatyzowały ręcznie obsługiwane wózki widłowe i pojazdy z platformami. Lata 70. przyniosły nowe rozwiązania – bardziej wydajne akumulatory, szafy sterownicze z urządzeniami przekaźnikowymi (co pozwoliło wdrażać więcej maszyn bez obaw, że zderzą się ze sobą lub wzajemnie zablokują), a także integrację z procesami produkcyjnymi, która umożliwiła stosowanie pojazdów jako mobilnych stołów montażowych.
Przykładem przedsiębiorstwa używającego urządzenia AGV w tamtym czasie jest Volvo. Szwedzki koncern w fabryce Kalmar z pomocą 186 maszyn transportował m.in. karoserie pomiędzy stacjami roboczymi. Firma następnie wdrożyła rozwiązanie w kolejnych zakładach, m.in. w miejscowościach Eskilstuna i Skövde. Na początku lat 80. wózki samojezdne pojawiły się w wytwórni Ingolstadt Audi. Wtedy też do powszechnego użycia wszedł termin Automated Guided Vehicle.

Jak poruszają się roboty typu AGV?
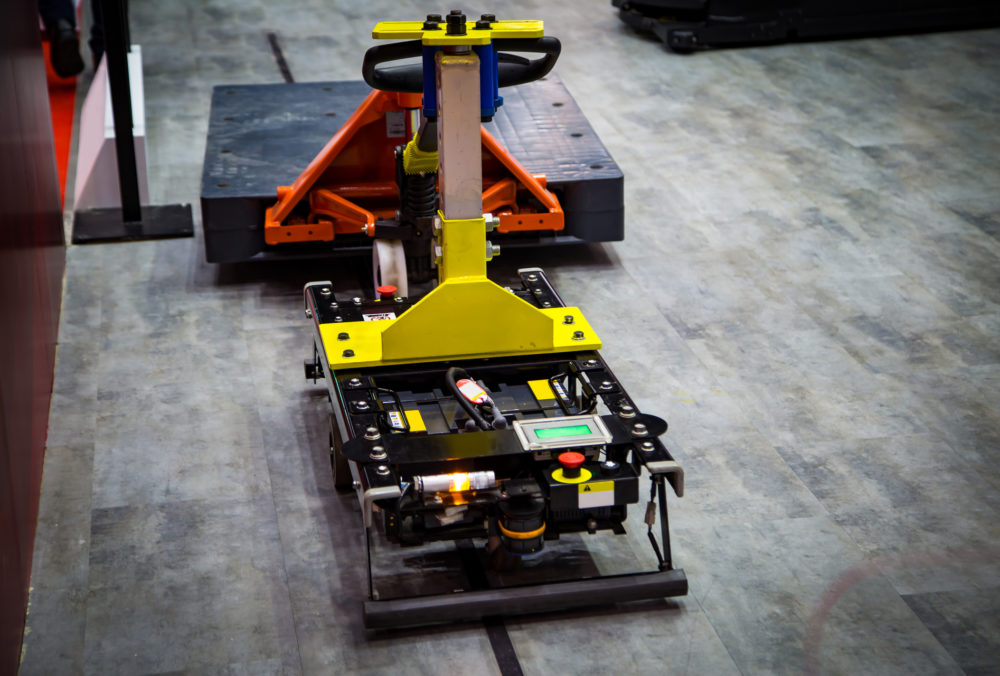
Wózkami samojezdnymi, które transportują ładunki na sobie, bądź ciągną je za sobą, można sterować na kilka sposobów. Metody nawigacji obejmują m.in. wykorzystanie taśmy magnetycznej lub kolorowej taśmy refleksyjnej/pasa namalowanego farbą refleksyjną, wzdłuż których poruszają się maszyny z odpowiednimi czujnikami. Jedną z zalet taśmy jest łatwość zmiany trasy robotów, co o wiele trudniej wykonać z zamontowanymi pod podłogą przewodami. Natomiast minusem taśm lub punktowych oznaczeń umieszczanych na podłożu jest to, że nie sprawdzą się w miejscach o dużym natężeniu ruchu, gdzie mogą być łatwo zabrudzone.
Inny sposób polega na wykorzystaniu nadajnika/odbiornika laserowego zainstalowanego na obrotowej wieżyczce – dzięki temu urządzenie może określić swoje położenie względem odblaskowych elementów umieszczonych na ścianach lub maszynach stacjonarnych i porównać je z mapą symboli. Nawigować da się również dzięki żyroskopowi wykrywającemu zmiany położenia wózków, ale to z kolei wymaga zamontowania transponderów w podłodze, np. w miejscach punktów przystankowych. Czasami wózki AGV korzystają z tzw. nawigacji naturalnej dzięki sensorom odległości – wówczas roboty, znając swoją lokalizację, są w stanie zaplanować najkrótszą ścieżkę do celu, a nawet ominąć przeszkodę na trasie.
Dane i zastosowania
Zgodnie z danymi prezentowanymi w portalu Statista, w 2019 roku na świecie było prawie 139 tysięcy wózków samojezdnych AGV. Szacunki dotyczące 2021 roku wskazują wzrost do przeszło 165 tysięcy, a prognozy na 2025 rok mówią o 272 tysiącach. Przedsiębiorstwo Markets and Markets wyceniło wartość rynku tych urządzeń w zeszłym roku na 2,2 miliarda dolarów, przewidując, że w 2026 suma urośnie do 3,2 miliarda dolarów. Jednak szybszego rozwoju rynku będzie można spodziewać się w przypadku urządzeń AMR (ang. Autonomous Mobile Robots), które do 2027 roku będą stanowiły 80% transportowych robotów mobilnych w przemyśle.
Urządzenia są używane do transportu surowców z miejsc dostawy do magazynów lub ze składów na linie produkcyjne. W drugim kierunku jeżdżą z gotowymi wyrobami. Mogą też przewozić elementy pomiędzy poszczególnymi stanowiskami montażu. Jednym z popularnych zastosowań AGV jest obsługa palet, czyli odbiór, przewiezienie do punktu owijania folią, a następnie do miejsca wysyłki. Można używać ich również do załadunku przyczep czy wywozu pojemników z odpadami z hal. Jeśli chodzi o branże, poza firmami przemysłowymi i logistycznymi, z robotów korzystają także przedsiębiorstwa farmaceutyczne, gdzie wózki ułatwiają spełnianie standardów produkcyjnych, oraz spółki zajmujące się handlem elektronicznym.
Po wałbrzyskim zakładzie Faurecia Frames, wytwarzającym fotele samochodowe, poruszają się Versaboty – maszyny AGV polskiego producenta VersaBox. Roboty obsługują 30 lokalizacji, m.in. spawalnię i lakiernię, wykonują około 200 kursów dziennie i przewożą w sumie 70 ton towaru. Kierownik produkcji, Bartłomiej Magiera zaznacza, że wyeliminowało to problem niezaplanowanych przestojów. Z kolei w fabryce Toyoty, również położonej w Wałbrzychu, podzespoły transportują urządzenia firmy WObit, założonej w 1991 roku przez Witolda Obera. To zarówno modele CubeRunner o udźwigu 200 kg, jak i FlatRunner MW umiejące przewieźć 1800 kilogramów. W portalu pisaliśmy jeszcze o urządzeniach Mobot nawigowanych dzięki Laser Mapping System.
Wdrożenie AGV w przedsiębiorstwie
Na początku roku w życie weszły przepisy dotyczące ulgi podatkowej na robotyzację. Stosując je, przedsiębiorcy mogą odliczyć od podstawy opodatkowania część kosztów poniesionych na zakup nowych robotów przemysłowych. Urządzenia w ustawie są zdefiniowane jako automatycznie sterowane, programowalne, wielozadaniowe i stacjonarne lub mobilne maszyny o co najmniej 3 stopniach swobody, mające właściwości manipulacyjne bądź lokomocyjne – dla zastosowań przemysłowych.