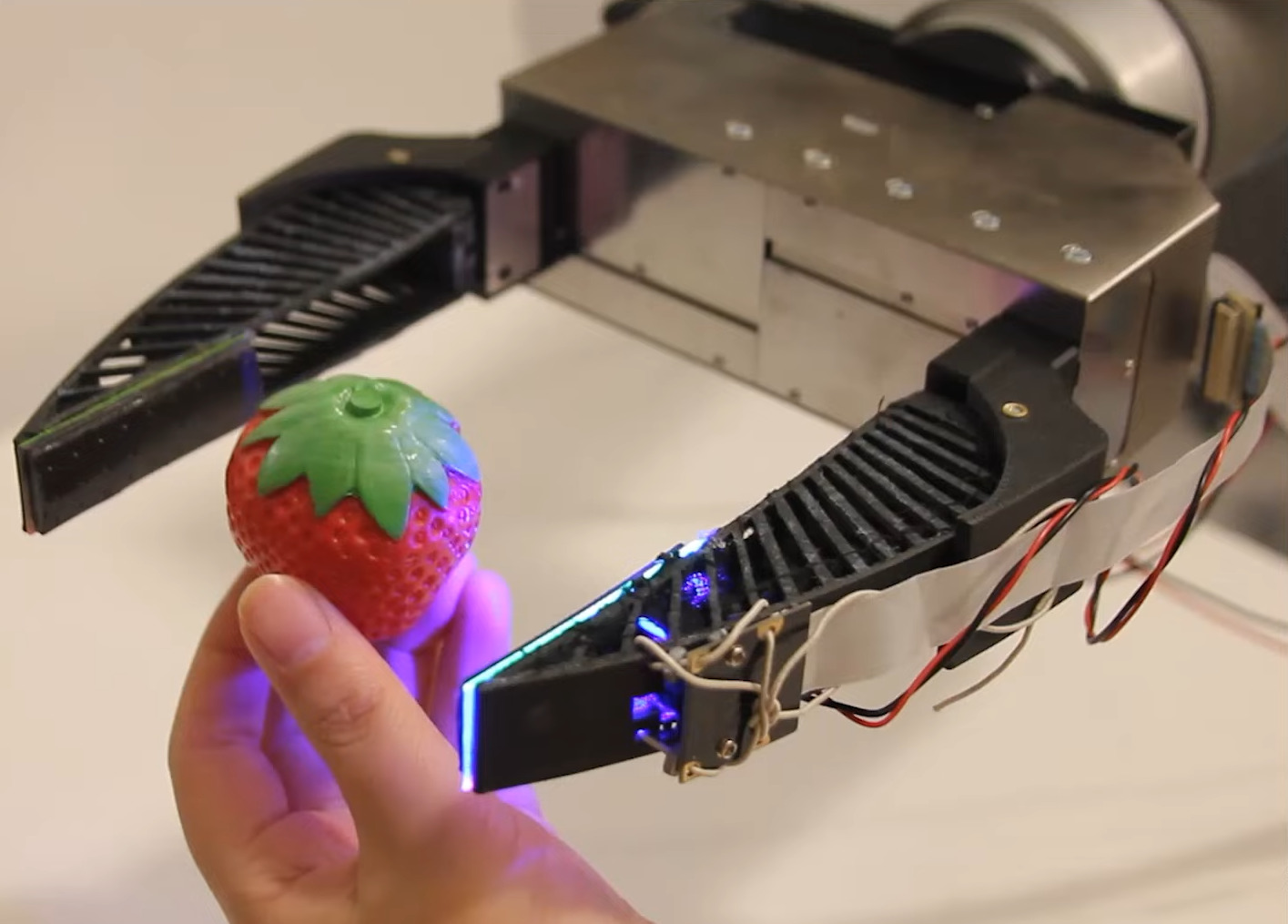
Urządzenie opracowali naukowcy Laboratorium Informatyki i Sztucznej Inteligencji (CSAIL) Massachusetts Institute of Technology – prof. Edward Adelson i Sandra Liu. Chwytak przypomina ludzką dłoń, jeśli chodzi o umiejętność manipulowania przedmiotami. Ponadto, badacze wykorzystali sensory dotyku, które dorównują czułości ludzkiej skóry. Dwa elastyczne „palce”, wykonane w drukarce 3D, dopasowują się do kształtu trzymanego przedmiotu. Badacze zrezygnowali z umieszczenia wewnątrz elementów wsporników, które utrzymywałyby konstrukcję. Zamiast nich, w środku umieścili kamerę i czujniki.
Testy chwytaka
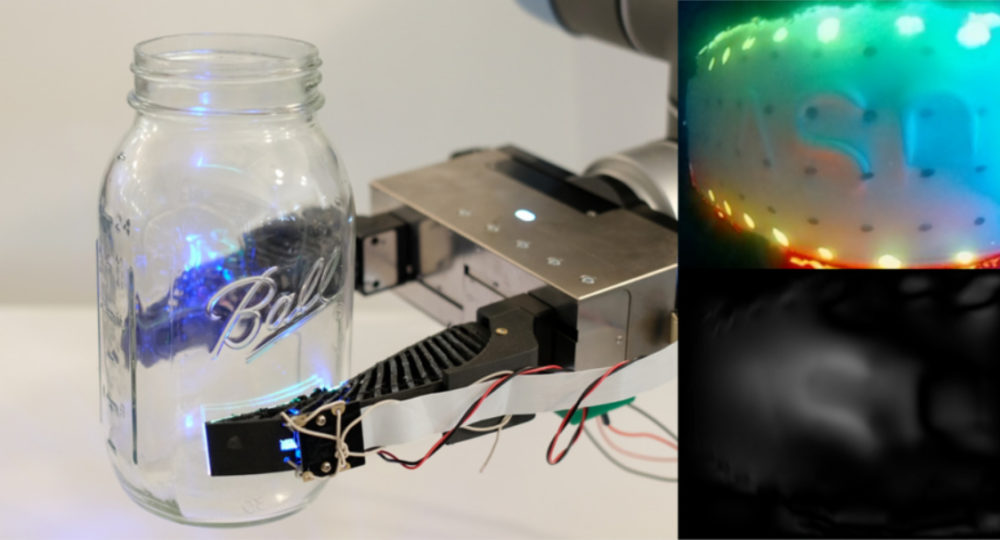
Na końcówkach urządzenia znajdują się płytki akrylowe, do których przyklejono warstwy z żelu silikonowego. Odkształcenia obu warstw, podświetlone za pomocą diod elektroluminescencyjnych, są nagrywane przez kamerę. Z kolei obraz na bieżąco analizują algorytmy, które oceniają kształt chwytanego obiektu, fakturę powierzchni, orientację w przestrzeni, a także siłę wykorzystaną przez „palce”. Podczas testów urządzenie poradziło sobie m.in. z utrzymaniem niewielkiego wkrętaka, a także tubki farby akrylowej, a nacisk nie spowodował rozlania zawartości pojemnika. Chwytak w większości prób był w stanie podnieść i odłożyć kieliszek, co z reguły jest trudne dla systemów wizyjnych z uwagi na załamanie światła.
Kolejne działania
Naukowcy w artykule wyjaśniają, że planują rozwój chwytaka, szczególnie w zakresie konstrukcji palców, która z powodu wydrążenia wnętrza, zaczęła się odkształcać. Następnym krokiem będzie chwytak z 3 „palcami”, który mógłby zajmować się zbiorami owoców i warzywa, a także oceną ich dojrzałości. Zamierzają również przygotować używane w projekcie czujniki GelSight tak, by były kompatybilne z innymi miękkimi chwytakami. Przypomnijmy, że sensory sprawdziły się w innym prototypie badaczy CSAIL MIT – chwytaku zdolnym do rozplątywania, układania i podłączania kabli.
Chwytaki do delikatnych przedmiotów
Naukowcy z Narodowego Uniwersytetu Singapuru przygotowali system, który umożliwia manipulowanie różnymi przedmiotami – bez względu na kształt czy masę. 3 rodzaje chwytaków wykorzystują wizję komputerową i algorytmy uczenia maszynowego do podejmowania decyzji odnośnie sposobu trzymania przedmiotów. Nad miękkimi końcówkami dla robotów przemysłowych, które mogą swobodnie przenosić delikatne obiekty, pracują m.in. OnRobot, producent chwytaka o kształcie kielicha, a także Soft Robotics – firma rozwijająca urządzenia różniące się liczbą par części chwytnych. W portalu pisaliśmy również o przyrządzie wykorzystującym zjawisko lewitacji akustycznej.