
Naukowcy z Narodowego Uniwersytetu Singapuru opracowali system umożliwiający robotom podnoszenie przedmiotów niezależnie od tego, czy są niewielkie i delikatne, czy też duże i ciężkie. Kierownik prac, Raye Yeow z Wydziału Inżynierii Biomedycznej i Centrum Zaawansowanej Robotyki NUS, podkreśla, że kształt, tekstura, masa i rozmiar obiektu wpływają na decyzje, jak go chwycić, co sprawia, że wiele gałęzi przemysłu nadal w dużym stopniu polega na pracy ludzkiej przy pakowaniu i przenoszeniu delikatnych przedmiotów – dla robotów chwytanie przedmiotów nie jest intuicyjne, dlatego potrzebują wizji komputerowej i algorytmów uczenia maszynowego. Inżynierowie zakładają, że ich rozwiązanie będą stosowali producenci artykułów spożywczych, firmy z branży rolnictwa wertykalnego oraz przedsiębiorstwa zajmujące się pakowaniem towarów.

3 warianty
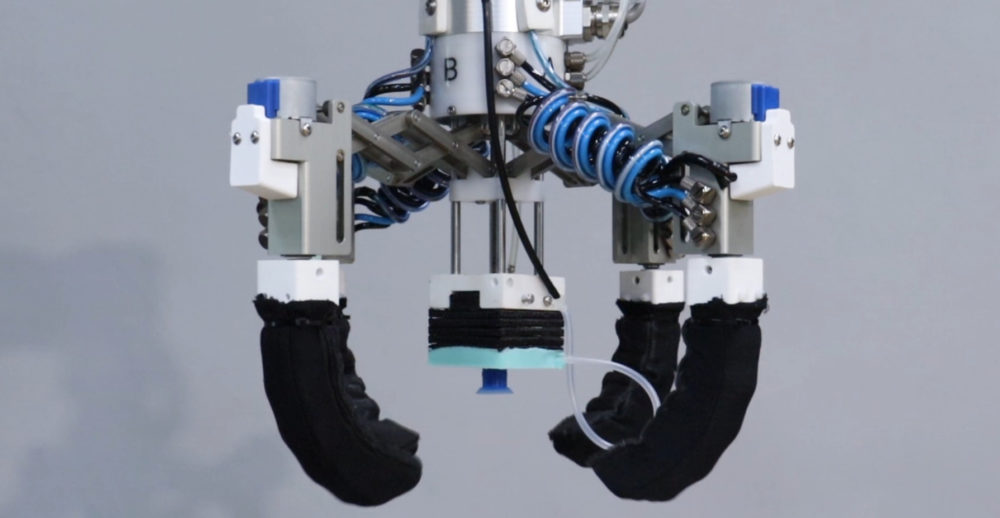
„Palce” chwytaków powstają na drukarkach 3D i mają mechanizm ułatwiający regulację sztywności elementów, montuje się je z kolei do konfigurowalnej podstawy. Badacze przygotowali 3 wersje urządzenia, zależnie od zastosowania. Pierwszy, GourmetGrip, przetestowany na 50 produktach, ułatwia przenoszenie delikatnych artykułów spożywczych z szybkością porównywalną do ludzkiej. Następny jest UnisoGrip (Universal Soft Gripper) o szerokim zastosowaniu. Dzięki uzupełnieniu o próżniową przyssawkę, chwytak potrafi manipulować elementami trudnymi do podniesienia ze względu na ich kształt. Trzeci natomiast łączy w sobie obie funkcjonalności i za sprawą spersonalizowanych chwytaków obsługuje przedmioty o dowolnych kształtach, rozmiarach do 30 cm szerokości i masie nieprzekraczającej 3 kg. Z rozwiązania korzysta People Bee Hoon Factory – singapurski producent wermiszelu ryżowego. Wdrożeniem zajmuje się startup RO+, założony przez pracowników uniwersytetu w ramach programu wsparcia pn. NUS Graduate Research Innovation Programme (GRIP).
Chwytaki do podnoszenia delikatnych przedmiotów
Przenoszenie kruchych towarów o masie 2,2 kilograma umożliwia chwytak przedsiębiorstwa OnRobot. Urządzenie, za sprawą silikonowych kielichów, łatwo dostosowuje się do artykułów o szerokości od 1,1 do 11,8 centymetra. Podobnym rozwiązaniem zajmuje się amerykańska firma SoftRobotics, która zdecydowała się na konstrukcję złożoną z par elementów chwytających. Ich liczba zależy od wielkości podnoszonych rzeczy. Do kwestii manipulowania delikatnymi i drobnymi częściami, inaczej podszedł Marcel Schuck z politechniki w Zurychu – naukowiec wykorzystał fale dźwiękowe. Schuck przygotował urządzenie złożone z dwóch połączonych półkul, pomiędzy którymi, dzięki zjawisku lewitacji akustycznej, znajduje się unoszony przedmiot.