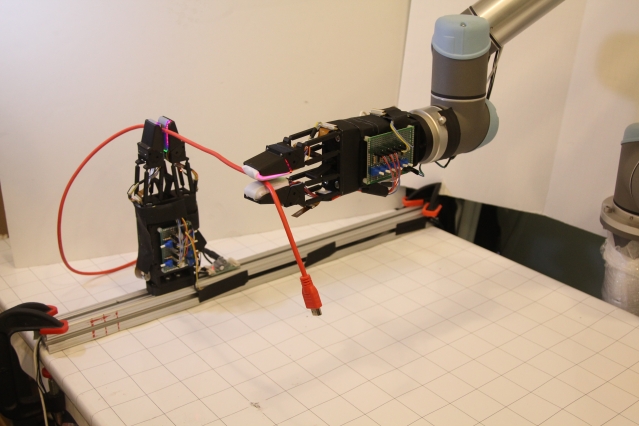
Sprawna praca z cienkimi i elastycznymi przedmiotami, takimi jak kable i sznurki, jest na razie dla robotów wyzwaniem – dlatego naukowcy z Laboratorium Informatyki i Sztucznej Inteligencji MIT opracowali system, który ułatwia naśladowanie ludzkich ruchów w czasie manipulowania przewodami czy nitkami. Jego najważniejszym elementem są zaprojektowane kilka lat temu czujniki GelSight tworzące w kontakcie z przedmiotem szczegółową, trójwymiarową mapę jego powierzchni. Sensory skonstruowano z miękkiego tworzywa z wbudowanymi kamerami, które szacują ułożenie kabla w chwytaku robota. Równolegle działają dwa sterowniki: pierwszy zmienia siłę, drugi reguluje pozycję chwytaka w taki sposób, żeby utrzymać kabel.
Co potrafią chwytaki?
Dwa połączone mogą przesuwać przewód podobnie jak ludzie – jeden przytrzymuje, drugi łapie i przesuwa. Badacze zaprogramowali też mechanizm, dzięki któremu robot potrafi umieszczać wtyczki w gniazdach. Mechaniczne dłonie z czujnikami GelSight przenoszą i pakują towary oraz montują elementy, a za sprawą nowych sterowników są w stanie układać lub nawet rozplątywać przewody. Minusem rozwiązania jest kształt sensora, bo w momencie, kiedy kabel dotyka krawędzi czujnika, trudno go przeciągnąć. Naukowcy mają w planach rozwój systemu, aby w przyszłości chwytaki swobodnie umieszczały przewody w listwach i kanałach instalacyjnych.
Inne projekty
W kwietniu firma OnRobot zakończyła prace nad miękkim chwytakiem dla branży spożywczej, jego silikonowe kielichy dopasowują się do przedmiotów, pozwalając przenosić obiekty. Pisaliśmy wcześniej w Platformie Przemysłu Przyszłości również o końcówce robotycznego ramienia, która unosi niewielkie i kruche rzeczy bez dotykania – za pomocą fal dźwiękowych. Z kolei współpracę ludzi z maszynami umożliwia system RoboRaise łączący elektromiografię z uczeniem maszynowym.