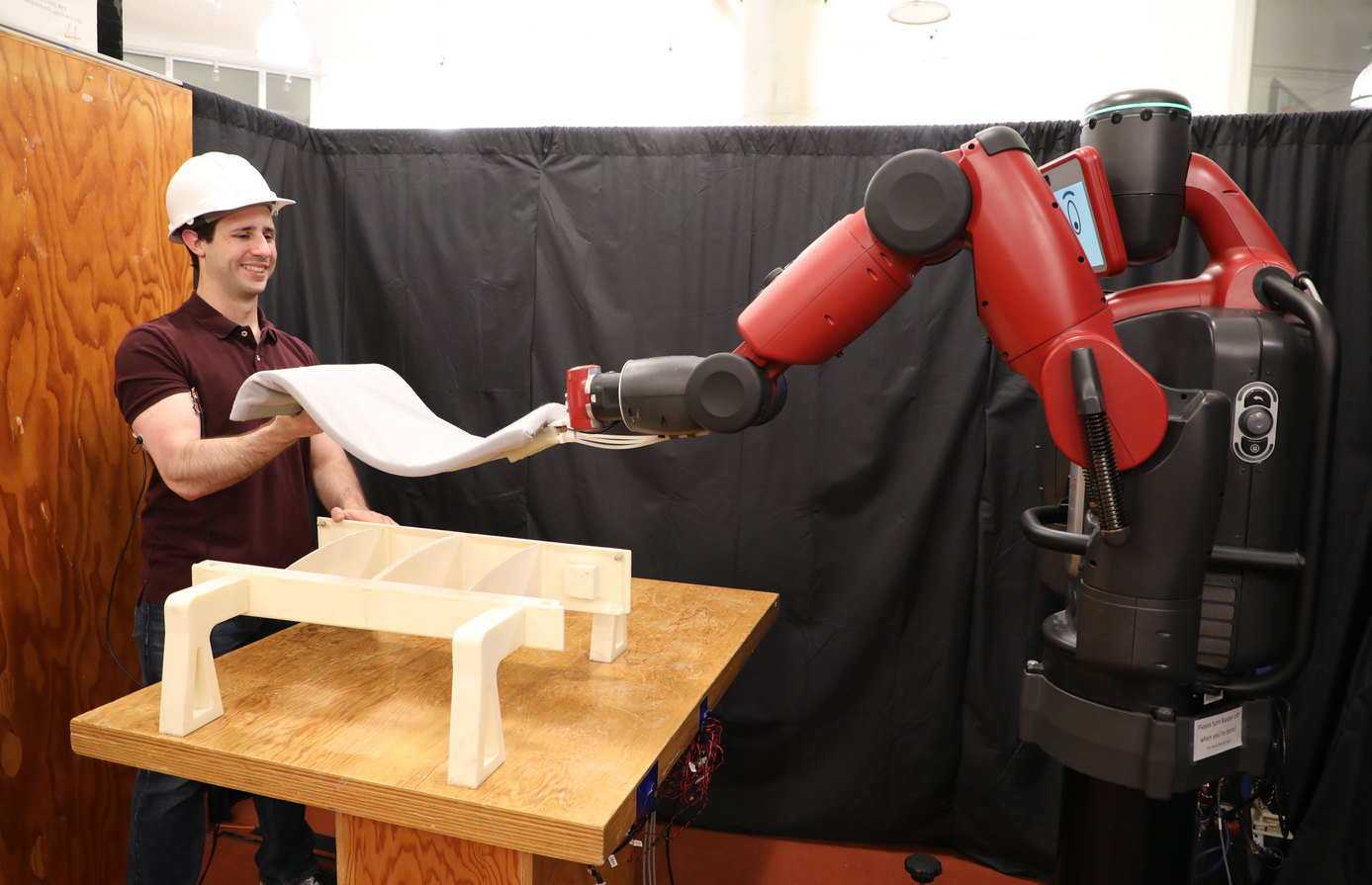
Naukowcy z MIT stworzyli system RoboRaise wykorzystujący sensory elektoromiograficzne i uczenie maszynowe, żeby umożliwić współpracę ludzi z maszynami przy podnoszeniu i montowaniu dużych przedmiotów. Czujniki EMG służące do diagnostyki czynności elektrycznej mięśni umieszcza się na bicepsie i tricepsie osoby, która współpracuje z robotem. Algorytmy uczenia maszynowego przetwarzają zmiany w położeniu ręki, ponieważ sam sygnał z czujników EMG nie pozwoliłby odpowiednio ocenić ruchu kończyny.
Gesty robota i człowieka mogą się różnić
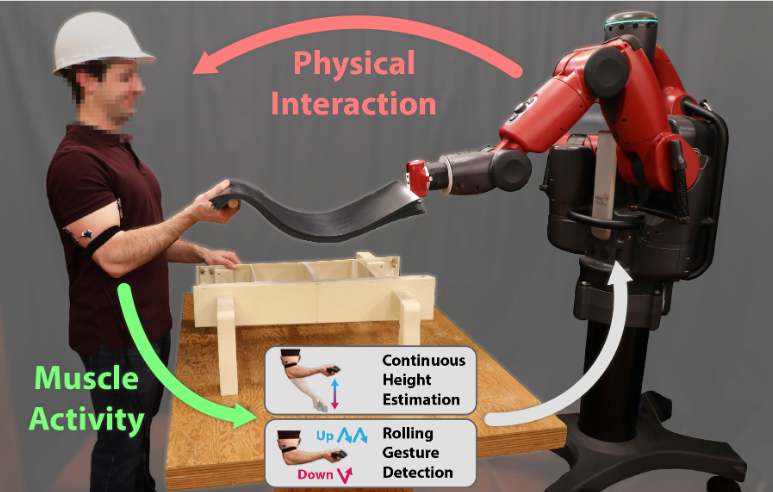
Sieć neuronowa będąca elementem systemu ma za zadanie przyporządkować pracę bicepsów i tricepsów do ruchów w górę oraz w dół. Napinanie i rozluźnianie mięśni umożliwia kontrolę działań robota, które nie muszą być dokładną kalką gestów człowieka. W ten sposób bez znacznego wznoszenia i opuszczania ramion można sprawić, że maszyna podniesie dany przedmiot wyżej lub niżej niż jej współpracownik. Uzupełnienie systemu o kolejne czujniki, np. na przedramionach, pozwala wykonywać trudniejsze czynności związane ze wspólnym montażem części.
– System ma być przede wszystkim intuicyjny i przypominać współpracę dwóch osób. Kluczowe jest używanie niewerbalnych wskazówek, które kodują informacje dotyczące koordynacji ruchów – wyjaśnia jeden z twórców rozwiązania, Joseph DelPreto, uzupełniając, że RoboRaise sprawdzi się dobrze w produkcji i budownictwie.
Szybka konfiguracja RoboRaise
Badacze przetestowali działanie systemu, przenosząc i montując z robotem elementy imitujące części samolotu. RoboRaise umożliwił sterowanie maszyną z dokładnością do kilku centymetrów, urządzenie reagowało poprawnie na około 70% wszystkich działań współpracownika. Nowy użytkownik jest w stanie szybko rozpocząć korzystanie z systemu, wystarczy, że kilka razy napnie i rozluźni mięśnie, a następnie podniesie lekki ciężar i utrzyma go na kilku różnych wysokościach. RoboRaise na czas testów zainstalowano w Baxterze, czyli humanoidalnym robocie wyprodukowanym przez Rethink Robotics, jednak naukowcy uważają, że system można wykorzystać do zarządzania każdą maszyną przemysłową z chwytakiem.
Poprzedni system obsługiwał fale mózgowe
RoboRaise jest rozwinięciem modelu stosującego zarówno czujniki EMG, jak i elektroencefalografię, ale w tamtej wersji współpraca polegała tylko na nadzorowaniu czynności maszyny – człowiek za pomocą fal mózgowych i ruchu rąk jedynie korygował zachowanie robota. Początkowe testy pierwowzoru RoboRaise były skuteczne w 70%. Z czasem naukowcom udało się poprawić wynik do 97% poprawnych reakcji na sygnały płynące z gestów i fal mózgowych.