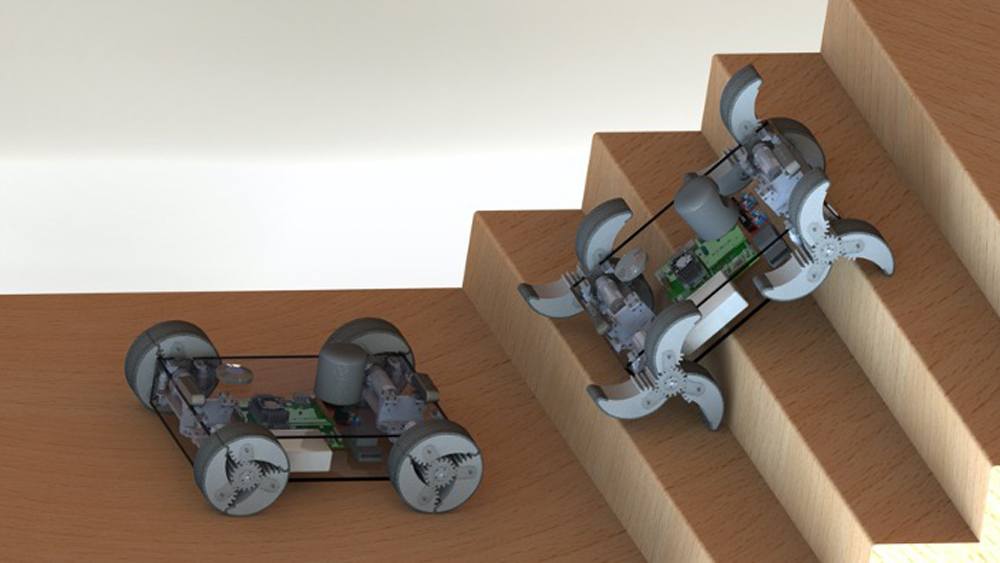
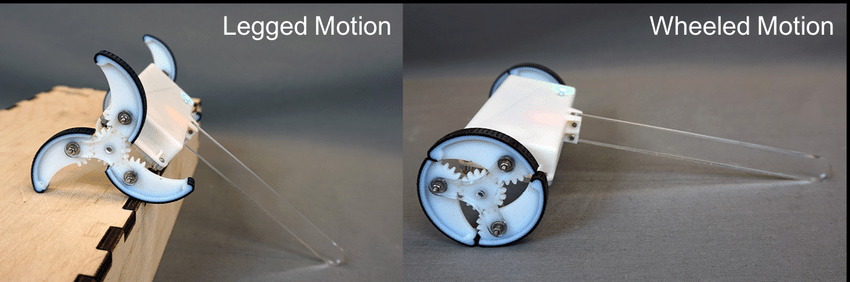
Naukowcy z Texas A&M University opracowali prototyp robota, który samodzielnie decyduje, czy w danym momencie powinien poruszać się na kółkach, czy też należy je rozłożyć, aby przybrały postać półokrągłych końcówek (jak na zdjęciu poniżej). Prowadząca projekt, Kiju Lee, tłumaczy, że zastosowanie mechanicznych nóg zazwyczaj jest bardziej uniwersalne, ale wiąże się z trudnościami dotyczącymi konstrukcji i układów sterowania:
– Nasz robot będzie wyposażony w mechanizm „transformacji”, ułatwiający przełączanie się układu jezdnego pomiędzy dwoma trybami pracy, bez konieczności stosowania dodatkowego napędu – wyjaśnia Lee.
(Nie tylko) militarne przeznaczenie
Urządzenie ma być gotowe w lutym 2021 roku. Konstruktorzy przygotowują je z myślą o zastosowaniach wojskowych, jednak zakładają, że model α-WaLTR przyda się również w rolnictwie i przemyśle, m.in. do monitorowania terenów. Inżynierowie usprawniają teraz mechanizm poruszania się robota razem z DARPA (Agencją Zaawansowanych Projektów Badawczych w Obszarze Obronności) w ramach programu OFFSET (OFFensive Swarm-Enabled Tactics), zakładającego budowę 250 autonomicznych jednostek naziemnych i powietrznych do zadań militarnych na terenie miast.

Roboty chodzące po nietypowych podłożach
Wcześniej naukowcy z Uniwersytetu Kalifornijskiego w San Diego wykorzystali fusy z kawy, projektując końcówki kończyn robotów, żeby umożliwić im poruszanie się po niepewnym gruncie. Testy prowadzili z udziałem 6-nożnej maszyny z systemem kontrolującym ciśnienie, żeby wnętrze „stóp” wykonanych z membrany utwardzało się lub rozluźniało zależnie od podłoża. Z kolei na Politechnice Wrocławskiej powstał robot kroczący – Krab, który potrafi pokonywać schody lub kamieniste nawierzchnie.